Detalles precisos:
Consejos
1. INAV, DSHOT no puede funcionar en S3, S5, S7 debido a un conflicto de DMA, por favor utiliza ONESHOT o MULTISHOT y calibra el rango de PWM del ESC.
2. BetaFlight, establezca dshot_bitbang = ON al usar X6 y X8 DSHOT.
3. BetaFlight, el nombre de destino fue cambiado a MatekF405TE_SD
4. ArduPilot, establece LOG_BACKEND_TYPE = 1 (File) para el registro en la tarjeta SD
Especificaciones
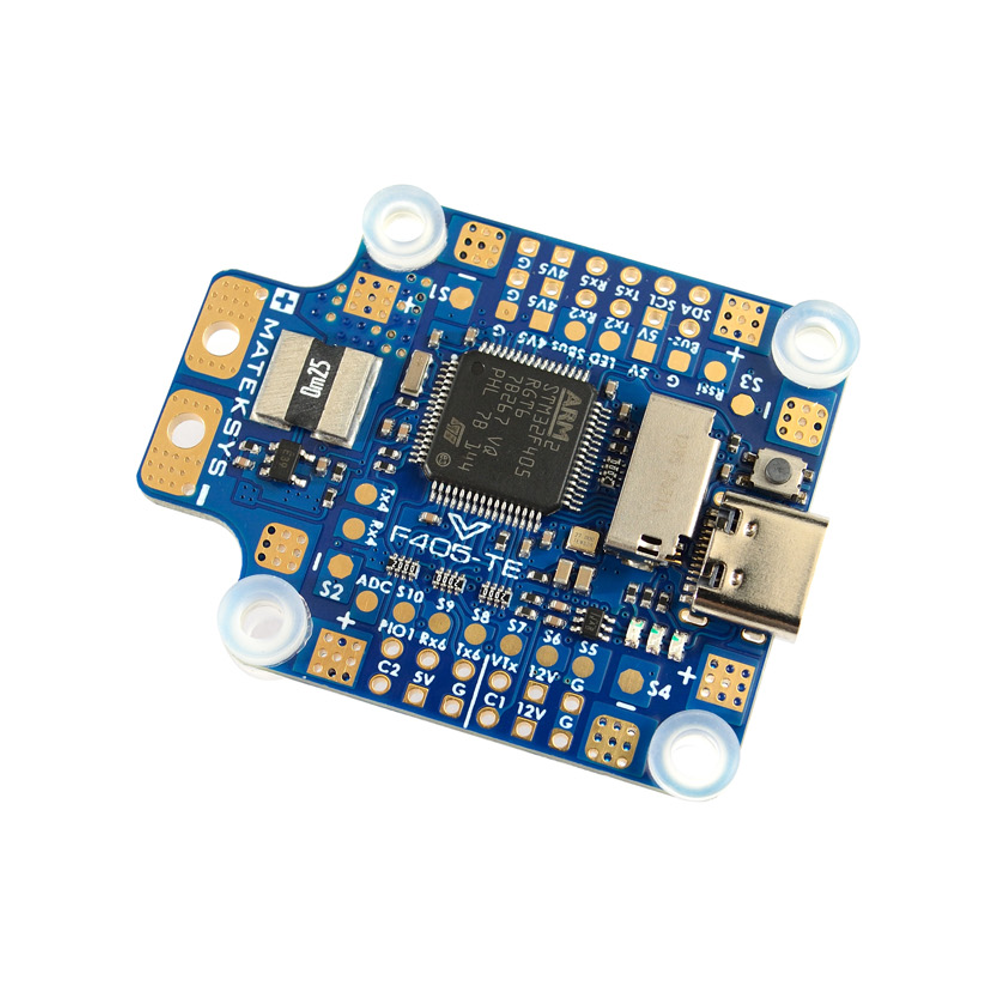
MCU: STM32F405RGT6, 168MHz
IMU: ICM42688-P (SPI)
Baro: SPL06-001 (I2C)
OSD: AT7456E (SPI)
Blackbox: ranura MicroSD (SPI)
6x UARTs, 1x opción Softserial_Tx (INAV/BF)
11 salidas PWM (8 compatibles con Dshot para BF/ArduPilot)
1x I2C
4x ADC (VBAT, Corriente, RSSI, Velocidad del aire)
1x PINIO de repuesto
4x almohadillas de energía/señal individuales ESC
1x Grupo de almohadillas G/S1/S2/S3/S4 para señal/ tierra de ESC 4 en 1
Inversor incorporado en UART2-RX para entrada SBUS
Entrada de cámara doble conmutable
Especificaciones PDB
9 ~ 36V (3 ~ 8S LiPo)
PDB: 4x 35A (Máx. 4x 50A)
BEC: 5V 1.5A
BEC: 12V 2A
LDO 3.3V: 200mA
Sensor actual: 220A, ADC 3.3V (escala INAV/BF 150, ArduPilot 66.7 A/V)
Divisor de voltaje de la batería 1K:20K (escala INAV 2100, escala BF 210, multiplicador de voltaje de ArduPilot BATT_VOLT_MULT 21.0)
Firmware
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD
BetaFlight: MATEKF405TE_SD
Físico
Montaje: 30.5 x 30.5 mm, Φ4 mm con arandelas Φ3 mm
Dimensiones: 36 x 46 mm
Peso: 10g
Incluyendo
1x F405-TE
6x arandelas de silicona M4 a M3
1x Rubycon ZLH 35V/470uF (baja ESR)
Diseño y cableado

Mapeo INAV/BF
Mapeo de ArduPilot
Telemetría Frsky Smartport
señal no invertida (hackeada) S.Port
cualquier Uart_TX de repuesto
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 o 10 (para yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIAL4_PROTOCOL = 33
MSP_OPTIONS = 0 (modo de encuesta)
Relé (PINIO)
PINIO1, pad PIO1, nivel bajo de forma predeterminada
PINIO2, Interruptor de la cámara, C1 ENCENDIDO por defecto
#
PA4 PINIO1 SALIDA GPIO(81) BAJA //Pin PIO1
PB5 PINIO2 SALIDA GPIO(82) BAJO //interruptor de la cámara
# RCx_OPTION: opción de entrada RC
28 Relé Encendido/Apagado
34 Relay2 Encender/Apagar
35 Rele3 Encendido/Apagado
36 Relé4 Encendido/Apagado
por ejemplo
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Relé Encendido/Apagado, Use CH7 del transmisor para controlar el nivel bajo/alto de PIO1
RELAY_PIN2 82 //Interruptor de cámara GPIO
RC8_OPTION 34 //Encendido/Apagado del relé2, use CH8 del transmisor para controlar el nivel alto/bajo en la almohadilla PB5
La característica configurada se activará cuando el valor PWM del interruptor auxiliar supere los 1800. Se desactivará cuando el valor caiga por debajo de 1200.
Verifique el valor PWM enviado desde el transmisor cuando el interruptor esté en alto y bajo utilizando la pantalla de Calibración de Radio en Configuración Inicial del Planificador de Misiones >> Hardware Obligatorio >>. Si no supera los 1800 o no desciende por debajo de 1200, es recomendable ajustar los puntos finales del servo en el transmisor.
Consejos
- F405-TE tiene firmware INAV precargado para control de calidad
- configure la frecuencia PWM de los ESC BLHeli32 en 48kHz o superior en BLHeliSuite
ArduPilot
Advertencia de errores internos 0x4000 l:213 spi_fail del firmware ArduPilot, por favor configure LOG_BACKEND_TYPE = 1 (Archivo) para el registro en tarjeta SD. Descargar el firmware de ArduPilot desde AQUÍ.
INAV
Con el firmware INAV, DSHOT no puede funcionar en S3, S5, S7 debido a un conflicto DMA. Por favor, usa ONESHOT o MULTISHOT y calibra el rango PWM del ESC.
Descargue el firmware INAV 4.1.x desde el sitio web de Matck. INAV5.x o más reciente directamente desde el configurador de INAV.
BetaFlight
Si se utiliza un zumbador pasivo de 5V, escriba en la CLI «set beeper_frequency = 2500»
La meta MATEKF405TE_SD fue compatible desde BF4.4.
Establecer dshot_bitbang = ON al usar DSHOT X6 y X8,
Puede descargar BF 4.3 directamente desde el configurador de BF, BF 4.2.x desde Aquí.
El barómetro SPL06-001 no es compatible con Betaflight.